
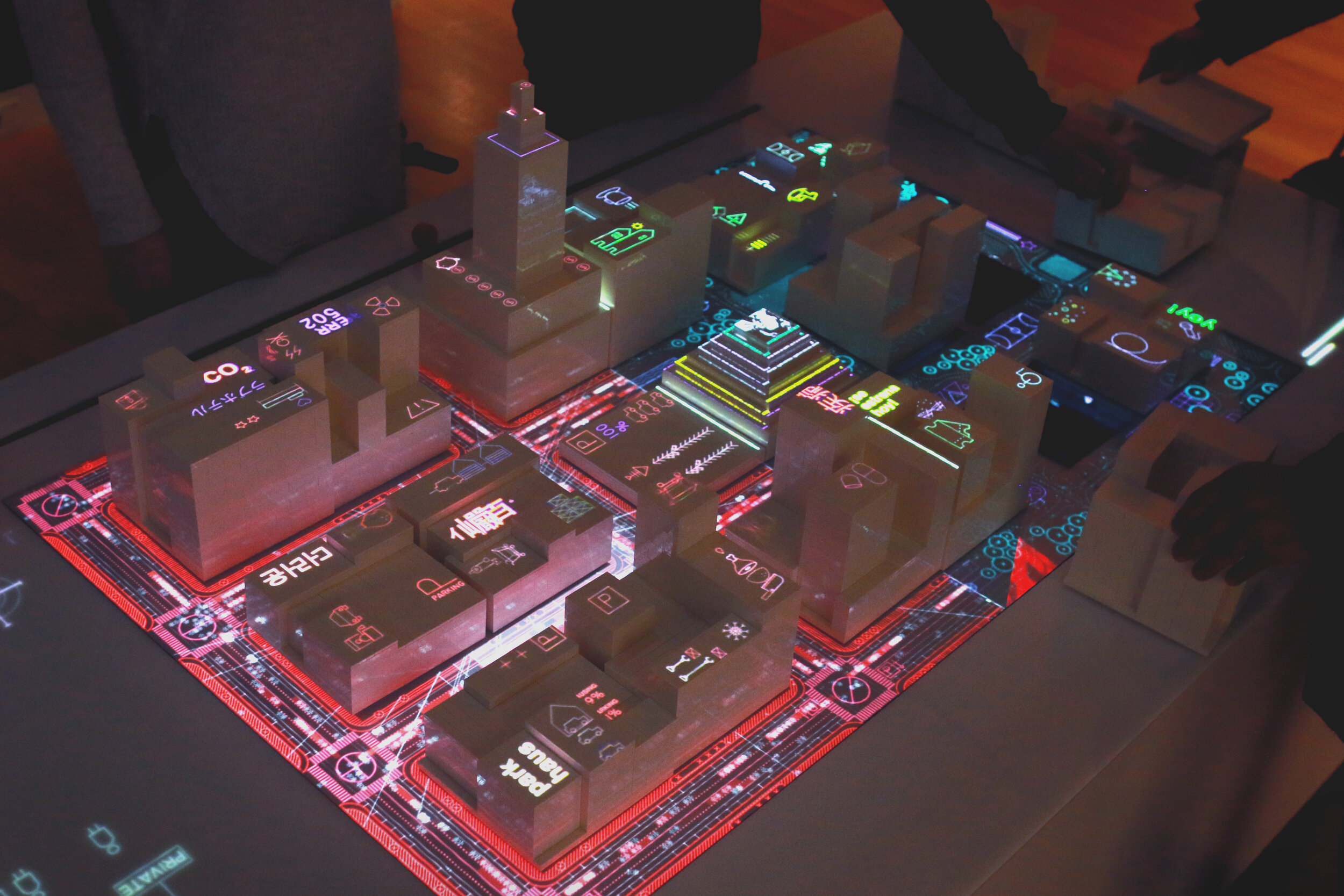
The CityScope - Autonomous Futures is an interactive installation for urban studies based on the CityScope platforms developed at MIT. It was commissioned by the Cooper Hewitt Museum in New York as part of the show "The Road Ahead: Reimagining Mobility." The intention of this installation was to demonstrate the impact a lightweight autonomous system could have on a city.
We are at the dawn of a mobility revolution, where autonomous vehicles will replace cars controlled by humans. We can envision this development along two possible divergent paths with very different implications for cities: Will we create an ownership society with privately-owned driverless cars? Or a world of shared social mobility robots available to all?
The buildings can be moved around the city model in real-time. These changes are detected by our system, and the impact of these changes is projected onto the model. This particular CityScope prototype allows for the visualization of these changes, while at the same time, a mechanical slider enables the user to see the results in one of two worlds.









This project code is open source: https://github.com/CityScope/CS_Cooper-Hewitt
The CityScope was created at MIT City Science group
Exhibited at: Cooper Hewitt Design Museum (New York, USA)
Art direction: Gabriela Bìlá
MIT City Science principal investigator: Kent Larson
MIT City Science team: Ariel Noyman, Arnaud Grignard, Carson Smuts, Guadalupe Babio, Luis Alonso Pastor, Maitane Iruretagoyena, Margaret Church, Markus Elkatsha, Ryan Zhang, Yasushi Sakai